
CUVIS-spine
Spine surgical robot system that guides the pedicle screw precisely as planned.
-

Point. 01
2D–3D Registration
The user is able to use a surgical planning based on preoperative CT through 2D-3D image registration.
-
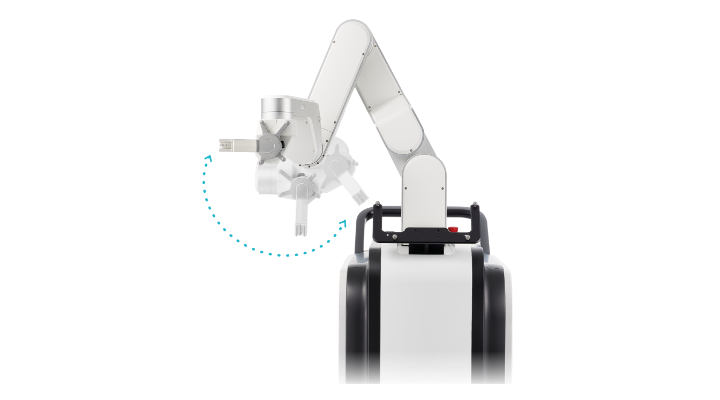
Point. 02
Approach
It enables surgery to be performed without changing the patient’s position, thus the surgical time can be reduced.
-
Point. 03
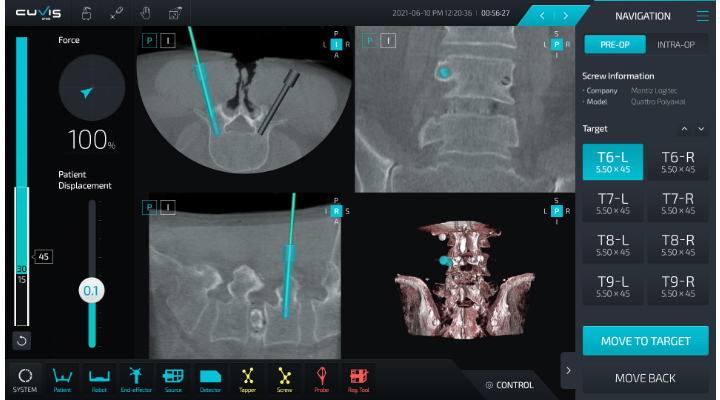
Navigation & Force Tracking
The OTS(Optical Tracking System) helps tracking the patient’s movement, surgical instruments and pedicle screw in real-time. The user can rely on the force rate and direction shown in real-time, which prevents skiving and potential danger during the surgery.


